首页
关于公司
新闻中心
产品中心
解决方案
成功案例
下载中心
联系我们
公司简介
荣誉证书
公司资质
企业文化
企业动态
行业资讯
其域手持扫描仪
华测无人船
华测扫描仪
MS900车载测量系统
机载激光雷达
三维数据处理软件
自然资源勘测
智慧城市
智慧交通
智慧工厂
智慧文物
室内外定位
产品彩页
软件插件
使用说明书
视频文件
硬件产品
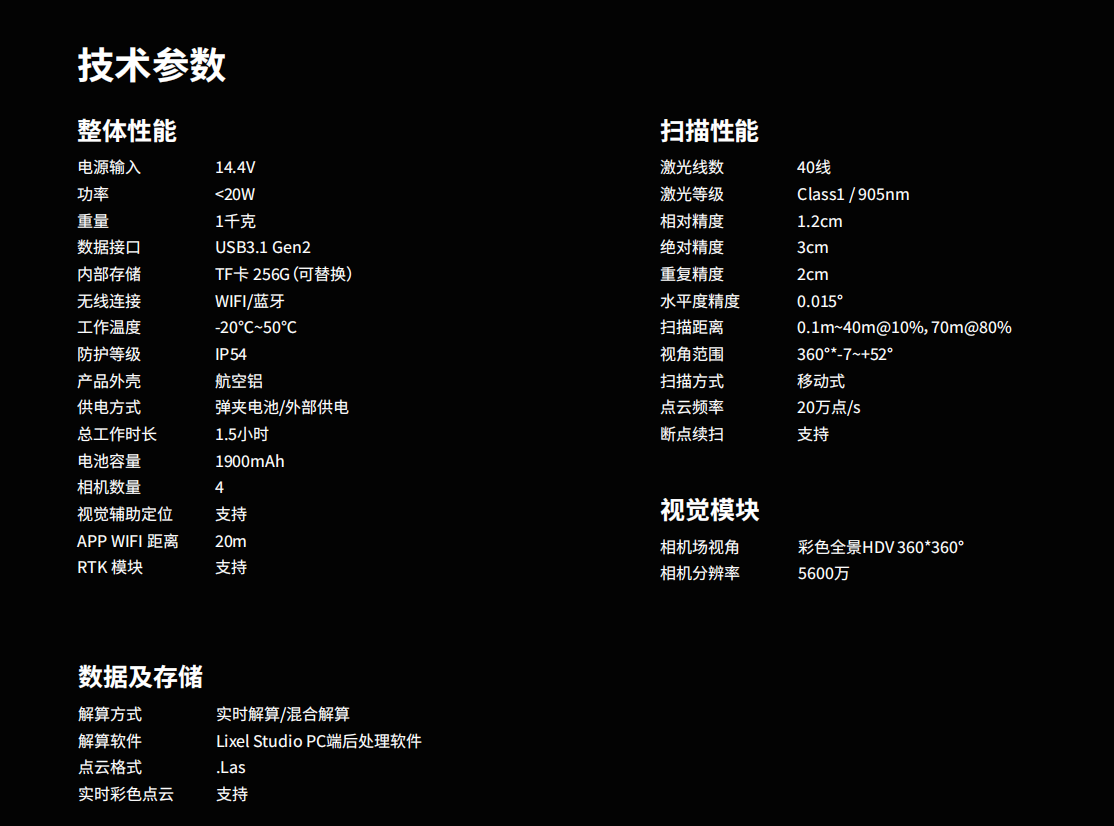
灵光Lixel K1手持扫描仪
灵光Lixel K1手持扫描仪
灵光K1是其域创新推出的小型手持扫描建模设备,不到1kg的小巧机身内集成了5600万像素全景视觉和360°激光雷达,实时生成厘米级彩色模型。
———
产品详情
———